Беспилотные летательные аппараты (БПЛА), широко известные как дроны, уже зарекомендовали себя как весьма перспективные для решения многочисленных проблем реального мира, например, позволяющие пользователям делать аэрофотоснимки, осуществлять мониторинг удаленной или природной среды, доставлять посылки или помогать агентам во время поисково-спасательных миссий и военных операций. Хотя эти системы уже используются многими компаниями и частными лицами по всему миру, они могут иметь существенные ограничения, такие как высокое энергопотребление и ограниченное время работы.
Таким образом, в последние годы робототехники изучают потенциал альтернативных конструкций летающих роботов, некоторые из которых вдохновлены птицами, летучими мышами, насекомыми или другими животными. Одними из наиболее многообещающих среди этих разработок являются так называемые роботы с машущими крыльями, которые воспроизводят движения птичьих крыльев, чтобы облегчить им полет.
Исследователи из лаборатории робототехники GRVC Севильского университета недавно провели исследование, изучающее возможные преимущества роботов с машущими крыльями, особенно с точки зрения их энергопотребления. В их статье, опубликованной на сервере предварительной печати arXiv, рассматривается потенциальная экономия энергии, связанная с конструкциями роботов с машущими крыльями, в экспериментальных условиях путем оценки производительности отдельных компонентов, лежащих в основе их функционирования.
«Одной из причин изучения воздушных роботизированных систем с машущими крыльями является стремление снизить энергопотребление за счет сохранения маневренности по сравнению с обычными беспилотными летательными системами», — написали Рауль Тапиа, Альваро Сезар Сатуэ и их коллеги в своей статье. «Летающий робот с машущими крыльями (FWFR) может скользить при благоприятных ветровых условиях, значительно снижая потребление энергии. В этой работе два набора компонентов FWFR анализируются с точки зрения энергопотребления: а) компоненты двигателя/электроники и б) система визуального наблюдения за окружающей средой во время полета.»
В своих экспериментах Тапиа, Сатуэ и их коллеги специально оценивали производительность робота с машущими крыльями, разработанного их лабораторией под названием E-flap. Этот робот, представленный два года назад, весит около 500 г и может автономно летать как в помещении, так и на открытом воздухе, взмахивая крыльями, как птица.
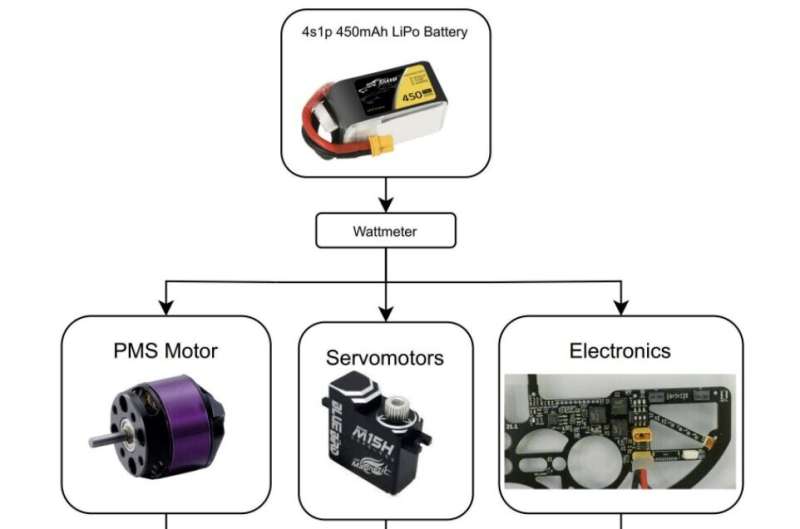
Исследователи провели серию тестов, чтобы оценить энергопотребление отдельных компонентов, использованных для создания первого прототипа робота, которые включают аккумулятор, двигатель, сервомоторы, электронику, искусственные крылья, хвост и систему подключения. Потребление энергии этими компонентами оценивалось на трех различных этапах полета робота — во время его запуска, во время набора высоты и во время крейсерского полета (т.е. полета на заданной высоте).
Они обнаружили, что при запуске и подъеме потребление энергии роботом составляло 52,9%, в то время как во время полета оно составляло 47,1%. Они также показали, что среди различных датчиков, которые позволили бы роботу воспринимать окружающее, камеры для проведения мероприятий были наиболее энергоэффективными. Результаты этого исследования могли бы послужить ориентиром для будущей разработки роботов с машущими крыльями, выделив компоненты, которые повышают их энергоэффективность и продлевают время полета.
«Измерительное устройство используется для регистрации использования мощности двигателями на этапах запуска и набора высоты, а также в крейсерском полете на заданной высоте», — написали Тапиа, Сатуэ и их коллеги в своей статье. «Кроме того, был проведен анализ камер наблюдения за событиями и систем стереовидения с точки зрения энергопотребления. Полученные результаты являются первым шагом на пути к снижению расхода заряда батареи и, следовательно, к увеличению времени полета».